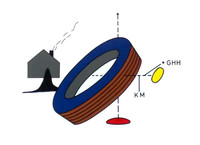
Six Degrees of Freedom
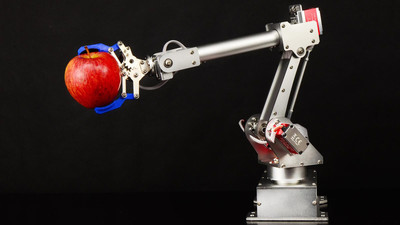
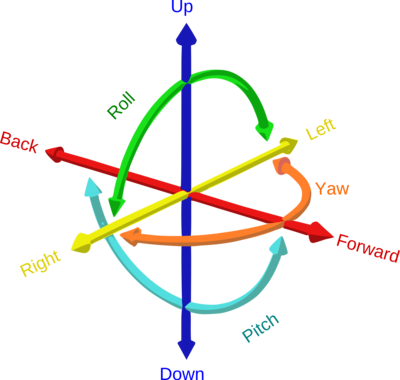
ADDPMP762The term three degrees of freedom (3DOF) is often used in the context of virtual reality and refers to the tracking of rotational motion only: pitch, yaw and roll. In robotics, serial and parallel manipulator systems are generally designed to position an end-effector with six degrees of freedom, consisting of three in translation and three in orientation. This provides a direct relationship between actuator positions and the configuration of the manipulator defined by its forward and inverse kinematics. Robot arms have been described by their degrees of freedom. However, in 2007, American engineer Dean Kamen, inventor of the Segway, unveiled a prototype robotic arm with 14 degrees of freedom for the Defense Advanced Research Projects Agency (DARPA). Now humanoid robots typically have 30 or more degrees of freedom, with six degrees of freedom per arm, five or six in each leg, and several more in the torso and neck.